In this 2021 talk at the University:Future Festival Eric Mazur describes his changes in his teaching during the Covid pandemic.
Eric Mazur is a professor of Physics at Havard University and well known in the area of higher education for the method of “Peer Instruction” during big lectures to activate students and increase interaction between teacher and students (Mazur 1996). This method was part of the famous article by Nobel laureate Carl Wieman (Deslauriers et al. 2011).
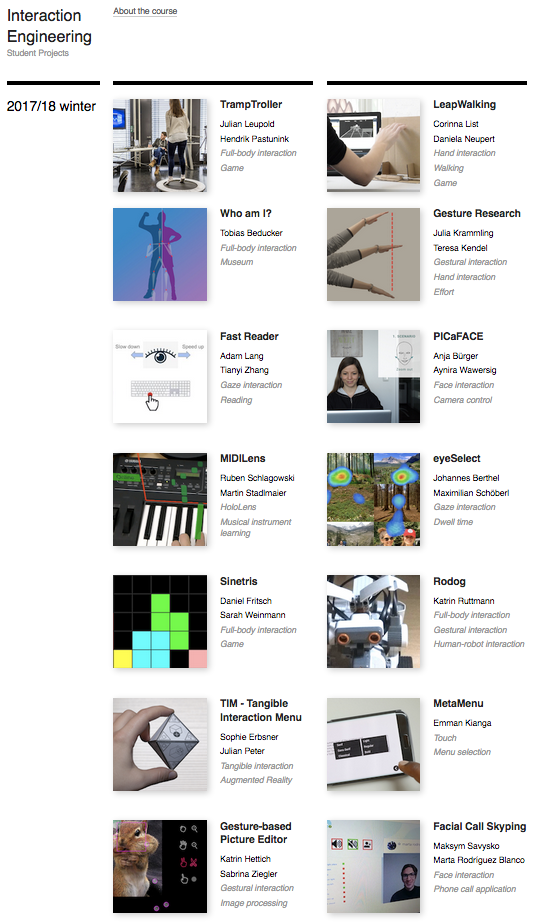
Last winter, my course Interaction Engineering was conducted on campus for the first part (autumn 2021) which really helped connecting the students. In November we had to switch to virtual meetings via Zoom but at this point most students already had a good idea what project to pursue with which partner.
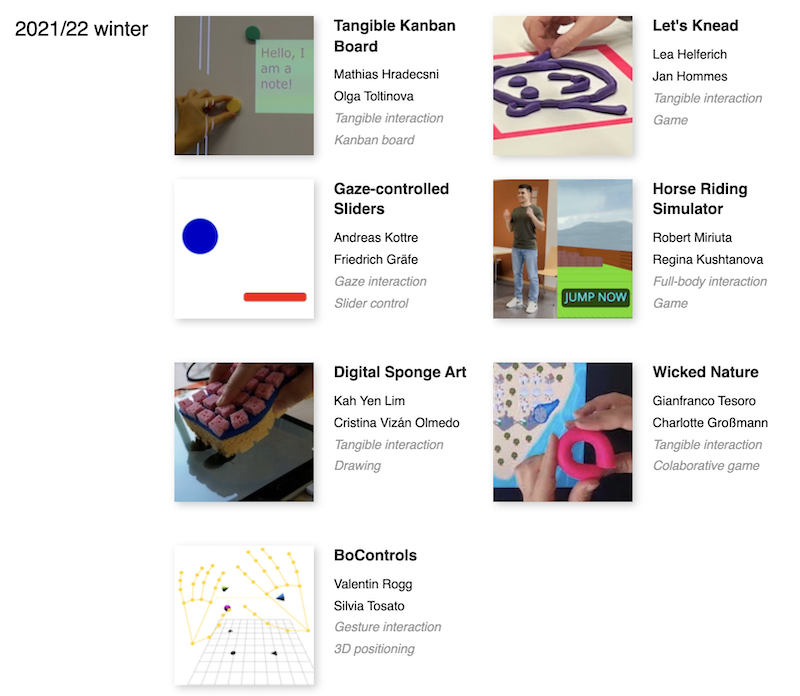
This year we had a large variety of interaction modalities, from tangible interaction, via gaze and gesture control to full-body interaction. All projects resulted in actual prototypes that were presented live on 2 Feb 2022.
Click on the following screen shot to get to our project page where you can browse all projects. Each project comes with a short video, a written report and a set of slides.
Microsoft’s Kinect sensor can recognize human bodies and track the movement of body joints in 3D space. In 2019 an entirely new version called Azure Kinect DK was released by Microsoft. It is the third major version of the Kinect.
Originally, the Kinect was released 2010 (version 1, Xbox) and 2013 (version 2, Xbox One) but production was discontinued in 2017. However, Kinect technology was integrated for gesture control in the HoloLens (2016). While the Kinect failed to become a mainstream gaming controller, it was widely used for research and prototyping in the area of human-computer interaction.
The camera looks quite different from its earlier cousins.
In early 2022 we acquired the new Azure Kinect for the Interaction Engineering course at the cost of around 750 € here in Germany.
Setting up the Kinect
The camera has two cables, a power supply and a USB connection to a PC. You have to download an install two software packages:
Azure Kinect SDK
Azure Kinect Body Tracking SDK
It feels a bit archaic because you need to run executables in the console. For instance, it is recommended that you perform a firmware update on the sensor. For this, go into the directory of the Azure Kinect SDK and call “AzureKinectFirmwareTool.exe -Update <path to firmware>”. The firmware is in another directory of this package.
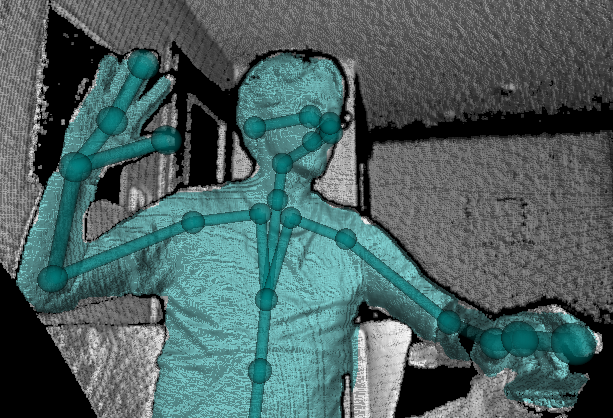
As a next step you go into the Azure Kinect Body Tracking SDK directory where you can start the 3D viewer. Again, this has one parameter so you cannot just click it in the file explorer. Type “k4abt_simple_3d_viewer.exe CPU” or “k4abt_simple_3d_viewer.exe CUDA” to start the viewer (in the /tools directory).
This is what you see (with the CPU version this is very slow).
Differences between Kinect versions
The new Kinect obviously improves on various aspects of the older ones. The two most relevant aspects are the field of view (how wide angled is the camera view) and the number of skeleton joints that are reconstructed.
There is an open-access publication dedicated to the comparison between the three Kinects:
Michal Tölgyessy, Martin Dekan, Ľuboš Chovanec and Peter Hubinský (2021) Evaluation of the Azure Kinect and Its Comparison to Kinect V1 and Kinect V2. In: Sensors 21 (2). Download here.
Skeleton
Here is a schematic view of the joints that are recognized. In practice it turns out one has to put special attention to the robustness of the signal concerning hands, feet and also head orientation.
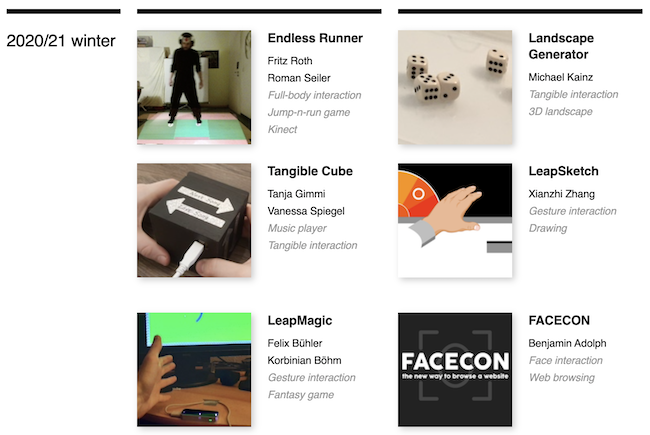
You can now browse the Interaction Engineering projects of the “Corona” winter semester of 2020/21 under interaction.hs-augsburg.de/projects. This year a number of projects dealt with gestural, full-body and face interaction in various settings, from games to music and drawing. Team work was difficult under pandemic condition but the students handled these difficulties brillantly.
Click on the following screen shot to get to our project page where you can browse all projects. Each project comes with a short video, a written report and a set of slides.
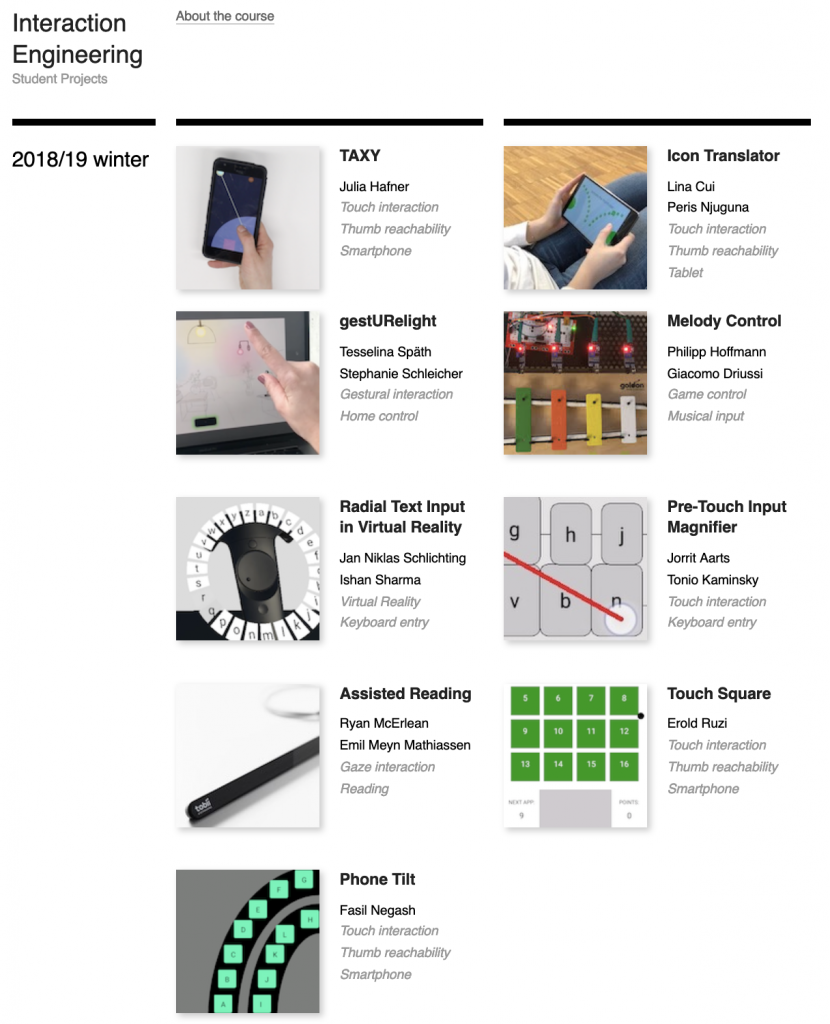
15 students from all over the world with different backgrounds (computing, design, business, …) successfully completed the course and submitted a finished prototype. This year a number of projects dealt with reachability on mobile devices but we also saw gestural, touch and gaze interaction, one virtual reality project and interaction with a musical instrument.
Congratulations to all students for their excellent outcomes!
Click on the following screen shot to get to our project page where you can browse all projects. Each project comes with a short video, a written report and a set of slides.
(es gab einige Updates bezüglich Windows, Dank an Corinna List und Stefan König für ihren Input…)
Leider gab es in letzter Zeit Entwicklungen, die es erfordern, dass alle, die mit Java (und NetBeans) arbeiten (oder es unterrichten) sich überlegen müssen, ob sie nicht umsteigen auf OpenJDK und auf IntelliJ.
Die eine Entwicklung ist, dass Oracle, die Firma, die Java bislang entwickelt hat, beschlossen hat, Java ab Januar 2019 zu kommerzialisieren. Das heißt: Ab sofort (Java 8) gibt es Updates nur für Entwickler*innen, die eine Lizenz erwerben. Das ist ein drastischer Einschnitt in der Geschichte der Sprache Java. (Siehe Artikel auf Heise, Artikel in Computerwoche und Artikel auf Aspera)
Zum Glück gibt es OpenJDK, eine open-source-Variante von Java. Diese Variante wurde 2007 von der Firma Sun Microsystems herausgegeben und wird aktiv von der Community weiterentwickelt. Laut Wikipedia ist “OpenJDK [is] the official reference implementation of Java SE since version 7”.
Die zweite Entwicklung betrifft die Entwicklungsumgebung NetBeans. Oracle will NetBeans “loswerden” und zu Apache abgeben (siehe Artikel auf ZDNET und Artikel auf Heise), was mittelfristig vielleicht keine schlechte Idee ist. Aber derzeit befindet sich NetBeans in einer Übergangsphase, so dass die Installation der “richtigen” NetBeans-Version umständlich und nicht unbedingt zu empfehlen ist.
Im weiteren zeige ich, wie man am besten umsteigt auf OpenJDK und IntelliJ IDEA.
Another round of fascinating interaction engineering projects is completed. In this interdisciplinary course (computer science and design, Bachelor and Master students), we think up potential future human-computer interaction techniques based on current research publications.
This year we had 14 completed projects by 27 students. A new record after 12 projects of last year. Projects include interaction by gesture, full body, eye gaze, face, tangible object, Hololens and trampoline! We even had a Lego robot.
Check out all projects (video, report, slides) under
We have acquired new equipment for optical tracking and motion capture at our Interaction Lab, Augsburg University of Applied Sciences. If you know the Kinect you can think of a much more accurate and faster Kinect. Our system consists of 12 high-speed infrared cameras (1280×1024, 240 fps) and the respective software (Motive), all by OptiTrack. It is capable of recording human motion sequences (e.g. fight or dance moves or everyday actions like walking or picking up an object). Actors have to be set up with small retroreflective markers. The system emits infrared light and computes the 3D position of each marker using triangulation. One can also mark up arbitray objects (tea cup, sword, wand) using at least three markers (these markers are then defined as so-called rigid bodies).
The recordings of human motion can be used for character animation in CG movies or computer games. The same data can also be streamed in realtime to external applications for interaction scenarios.
In human-computer interaction, the tracking data is used to interact with a computer via gestures and/or with your full body, depending on the application. Tracking is also interesting for VR applications where you want to interact naturally with your hands and body. The system is much faster and more accurate than e.g. the Kinect. The latency (time from original movement to visible reaction on screen) is around 5ms (depending on the processing time of the output). The spatial accuracy is around 1mm.
Our research interests target gestural interaction, e.g. comparing it with other forms of interaction like touch, mouse and other controllers.
The system is part of a research grant called Labor zur Erforschung und Entwicklung von Interaktionsmodellen mit Virtuellen Realitäten (laboratory for research and development on interaction models for virtual realities) by Rose, Müller, Rothaug, Kipp which is funded by Hochschule Augsburg.
Im Rahmen meiner Lehre produziere seit 2012 eigene Lehrvideos und stelle sie auf YouTube zur Verfügung. Da ich aktuell wieder in dem Bereich aktiv bin, dachte ich, ich stelle mal einige Tipps zu Ausrüstung und Workflow zusammen. Vielleicht ist damit ja dem ein oder anderen potentiellen Nachahmer geholfen…
Zwei Beispielvideos
Vielleicht vorab zwei Beispielvideos zum Thema “Programmieren lernen mit Processing”. Zunächst ein ganz aktuelles von 2017. Im Vergleich zu den alten Videos verwende ich jetzt ein besseres Mikro und habe eine Titelfolie eingefügt, damit die Videos bereits in der Vorschau klar erkennbar sind.
Und hier ein altes Video von 2014. Was direkt auffällt, ist die miserable Audioqualität. Man könnte denken “das kann man doch in der Nachbearbeitung verbessern”, aber mittlerweile habe ich eingesehen, dass man versuchen muss, direkt bei der Aufnahme ein möglichst gutes Signal hinzubekommen. Nachbearbeitung ist zeitaufwändig und nicht immer erfolgreich.
Jetzt aber zu Ausrüstung, Vorbereitung, Aufnahme und Nachbereitung (dazu ggfalls auf “continue reading” klicken).
Update: I decided to return the monitor because the latency was too high. Latency is the time that passes between moving your finger and seeing a reaction on screen. This was somewhere between 150 and 180ms which made the device unusable for research purposes.
Please welcome our latest addition to our Interaction Lab at Augsburg University of Applied Sciences, a 84″ multitouch display with a motorized stand which can be transformed into a table, a tilted table and a wall.
The monitor is part of a research grant called Labor zur Erforschung und Entwicklung von Interaktionsmodellen mit Virtuellen Realitäten (laboratory for research and development on interaction models for virtual realities) by Rose, Müller, Rothaug, Kipp which is funded by Hochschule Augsburg.
We intend to investigate the question of how efficiency and ergonomics of multitouch interaction can be measured to compare various input modalities (mouse, controller, gesture, touch). See the publications below to get an idea of our goals and methods. The new display allows to extend our previous work to large display sizes and multi-party scenarios.
Some technical data:
84″
4K resolution (3840×2160)
50 touch points
Related Publications
Lehmann, Florian (2016) Ergonomie von Multi-Touch Oberflächen, Bachelorarbeit, Studiengang Interaktive Medien, Hochschule Augsburg. | Bachelorarbeit |Präsentation | Poster | Read the blog post about this work