Last winter, my course Interaction Engineering was conducted on campus for the first part (autumn 2021) which really helped connecting the students. In November we had to switch to virtual meetings via Zoom but at this point most students already had a good idea what project to pursue with which partner.
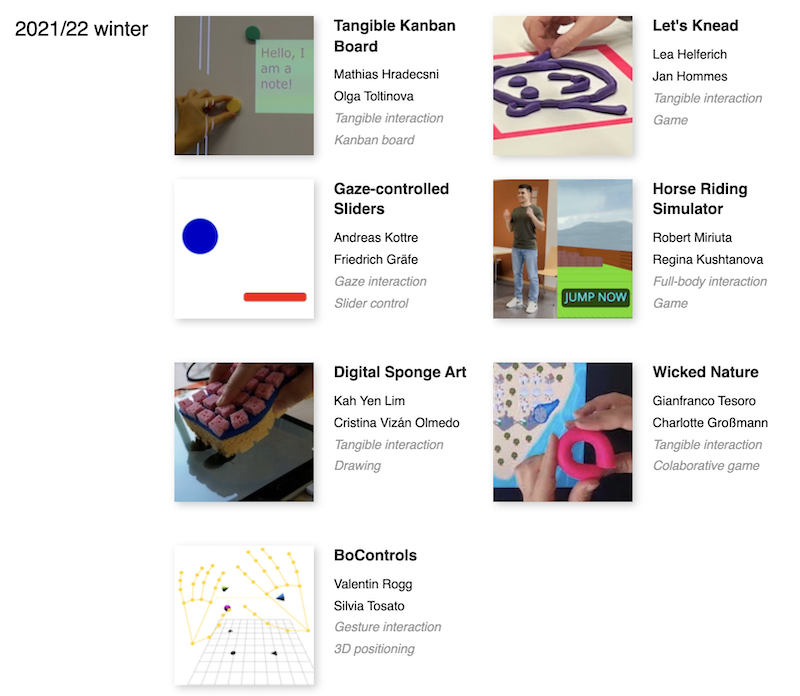
This year we had a large variety of interaction modalities, from tangible interaction, via gaze and gesture control to full-body interaction. All projects resulted in actual prototypes that were presented live on 2 Feb 2022.
Click on the following screen shot to get to our project page where you can browse all projects. Each project comes with a short video, a written report and a set of slides.
Microsoft’s Kinect sensor can recognize human bodies and track the movement of body joints in 3D space. In 2019 an entirely new version called Azure Kinect DK was released by Microsoft. It is the third major version of the Kinect.
Originally, the Kinect was released 2010 (version 1, Xbox) and 2013 (version 2, Xbox One) but production was discontinued in 2017. However, Kinect technology was integrated for gesture control in the HoloLens (2016). While the Kinect failed to become a mainstream gaming controller, it was widely used for research and prototyping in the area of human-computer interaction.
The camera looks quite different from its earlier cousins.
In early 2022 we acquired the new Azure Kinect for the Interaction Engineering course at the cost of around 750 € here in Germany.
Setting up the Kinect
The camera has two cables, a power supply and a USB connection to a PC. You have to download an install two software packages:
Azure Kinect SDK
Azure Kinect Body Tracking SDK
It feels a bit archaic because you need to run executables in the console. For instance, it is recommended that you perform a firmware update on the sensor. For this, go into the directory of the Azure Kinect SDK and call “AzureKinectFirmwareTool.exe -Update <path to firmware>”. The firmware is in another directory of this package.
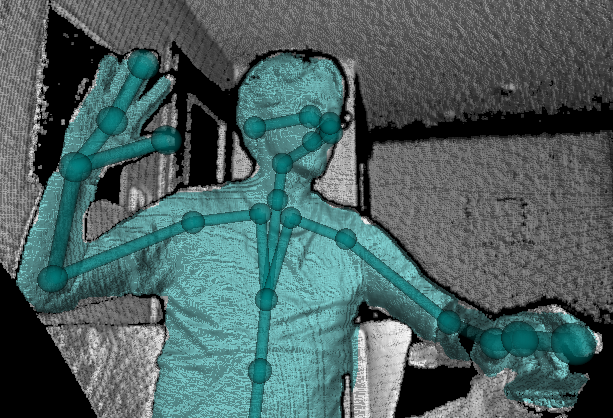
As a next step you go into the Azure Kinect Body Tracking SDK directory where you can start the 3D viewer. Again, this has one parameter so you cannot just click it in the file explorer. Type “k4abt_simple_3d_viewer.exe CPU” or “k4abt_simple_3d_viewer.exe CUDA” to start the viewer (in the /tools directory).
This is what you see (with the CPU version this is very slow).
Differences between Kinect versions
The new Kinect obviously improves on various aspects of the older ones. The two most relevant aspects are the field of view (how wide angled is the camera view) and the number of skeleton joints that are reconstructed.
There is an open-access publication dedicated to the comparison between the three Kinects:
Michal Tölgyessy, Martin Dekan, Ľuboš Chovanec and Peter Hubinský (2021) Evaluation of the Azure Kinect and Its Comparison to Kinect V1 and Kinect V2. In: Sensors 21 (2). Download here.
Skeleton
Here is a schematic view of the joints that are recognized. In practice it turns out one has to put special attention to the robustness of the signal concerning hands, feet and also head orientation.
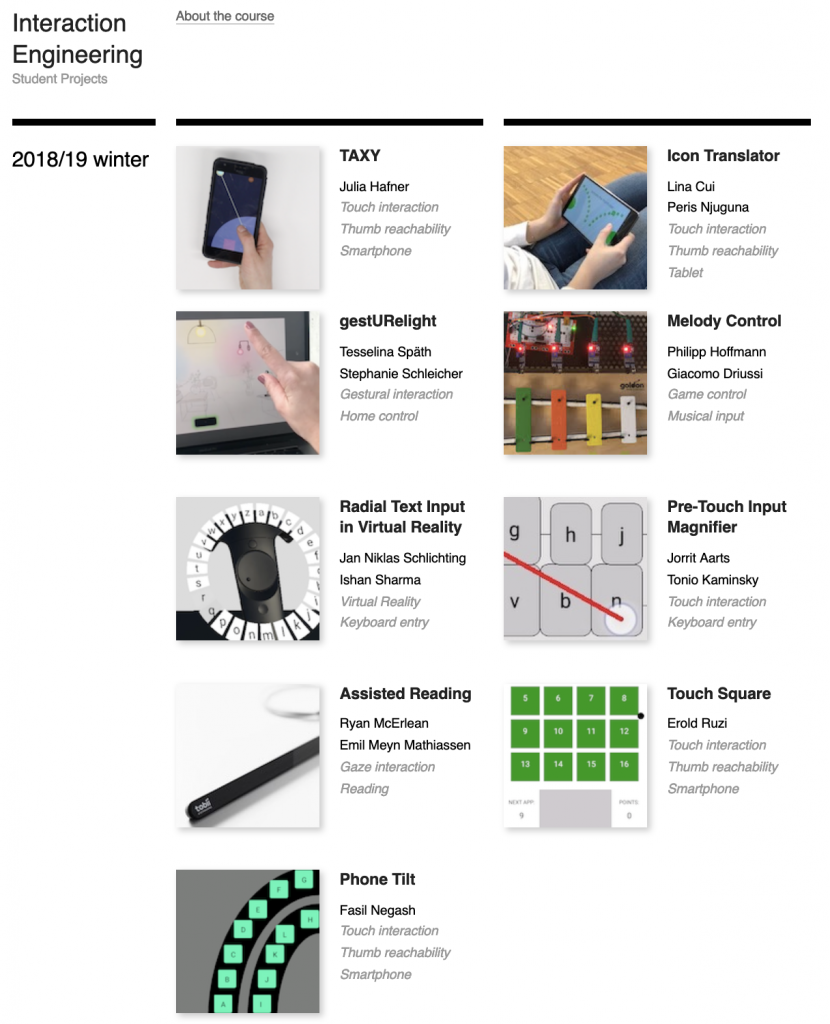
15 students from all over the world with different backgrounds (computing, design, business, …) successfully completed the course and submitted a finished prototype. This year a number of projects dealt with reachability on mobile devices but we also saw gestural, touch and gaze interaction, one virtual reality project and interaction with a musical instrument.
Congratulations to all students for their excellent outcomes!
Click on the following screen shot to get to our project page where you can browse all projects. Each project comes with a short video, a written report and a set of slides.
Another round of fascinating interaction engineering projects is completed. In this interdisciplinary course (computer science and design, Bachelor and Master students), we think up potential future human-computer interaction techniques based on current research publications.
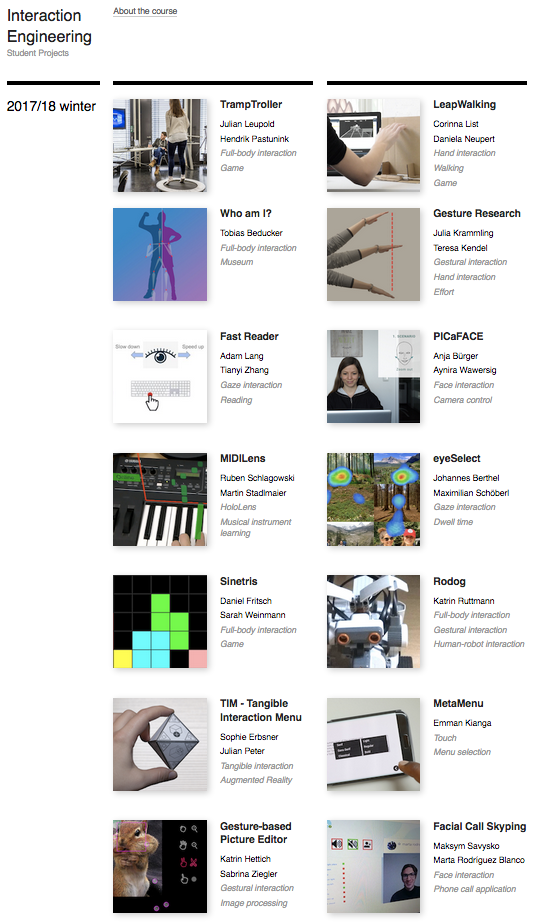
This year we had 14 completed projects by 27 students. A new record after 12 projects of last year. Projects include interaction by gesture, full body, eye gaze, face, tangible object, Hololens and trampoline! We even had a Lego robot.
Check out all projects (video, report, slides) under
The next group of talented students completed their interaction engineering projects. In this interdisciplinary course (computer science and design), we think up potential future human-computer interaction techniques based on current research publications. This semester there was a record-breaking set of 12 completed projects. Feel free to check them out by visiting the project website
Under http://interaction.michaelkipp.de/projects you will find the student prototypes of the Interaction Engineering course of winter 2013/14, Augsburg University of Applied Sciences.
While the current focus in HCI is sensor-based interaction (à la Kinect), recent developments could foster interaction with the eyes. The Danish company EyeTribe (formerly Senseye) is building a very nice tracking system with $2.3 million support from the Danish government. Partnering companies include the IT University of Copenhagen, DTU Informatics, LEGO and Serious Games Interactive.
EyeTribe plans to release an SDK for app development next year.
Nice project about a lamp called “Pinokio” with personality that is curious, looks at you and doesn’t like to be switched off – inspired by the famous Pixar lamp. Created by Shanshan Zhou, Adam Ben-Dror and Joss Doggett. The lamp is driven by Arduino components and programmed in Processing. Visit the project page or the technical build log.
Although Microsoft has a reputation for building suboptimal user interfaces, its research department actually has several world-class interaction design researchers (like Buxton, Hinckley, Wilson, Benko). There is no big human-computer interaction conference, be it CHI, SIGGRAPH, UIST or ITS, without several papers and keynote speakers from Microsoft Research. Recently, Microsoft has released several videos about the future in human-computer interaction, and these video actually assemble many quite recent research findings which are adopted almost one-to-one.
Here’s another one:
Some of the research concepts you see in the videos are:
Proxemic interaction (cf. Saul Greenberg, Till Ballendat et al.)
Jakob Nielson is a well known and highly regarded expert in the world of interface/interaction design and human-computer interaction in general. He wrote a critique on Windows 8 shortly after its release which caused a lot of controversy in the net (try Google with “Nielson Windows 8”). Nielson heavily criticizes the way that Windows 8 tries to fuse desktop and mobile UI.
What’s interesting is that Nielson did empirical user studies with 12 experienced PC users. The findings that I find most relevant are these three:
The double desktop (one traditional, one with big touchable tiles) is confusing since one has to switch between two worlds that work very differently (inconsistency).
The flat Metro style, while visually pleasing, makes it hard to distinguish regular text from clickable links.
Some of the new gestures that e.g. require the user to swipe from the outside of the touchpad into it are highly error-prone.
I recently got my own Windows 8 laptop and could experience “live” some of these concerns. Even now, I find it difficult to know whether I’m in the Metro world or in the traditional desktop world because with ALT+TAB you switch between all applications (of both worlds). Gesture interaction is a pain. Of course, Microsoft has the problem that it tries to introduce new interaction techniques for a huge range of actual hardware devices. That may be one reason why the resulting experience does not feel as optimized as in Apple products.
Nielson’s own summary is this:
Hidden features, reduced discoverability, cognitive overhead from dual environments, and reduced power from a single-window UI and low information density. Too bad.
If you want a balanced picture, read some of the counter arguments on the net. I do not link up any because I haven’t found anything substantial yet.