2024
Polished by Gesture
Felix Straub
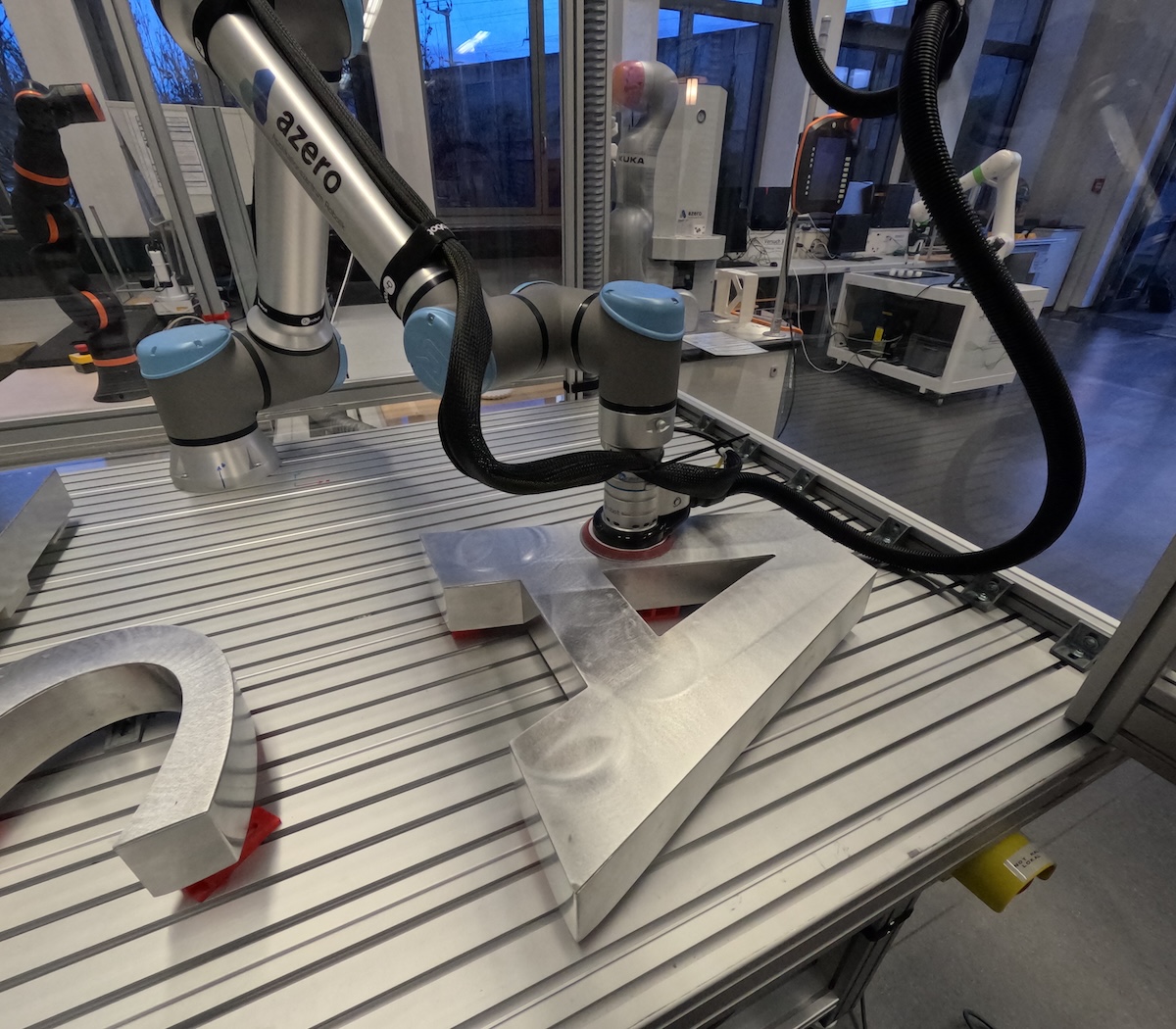
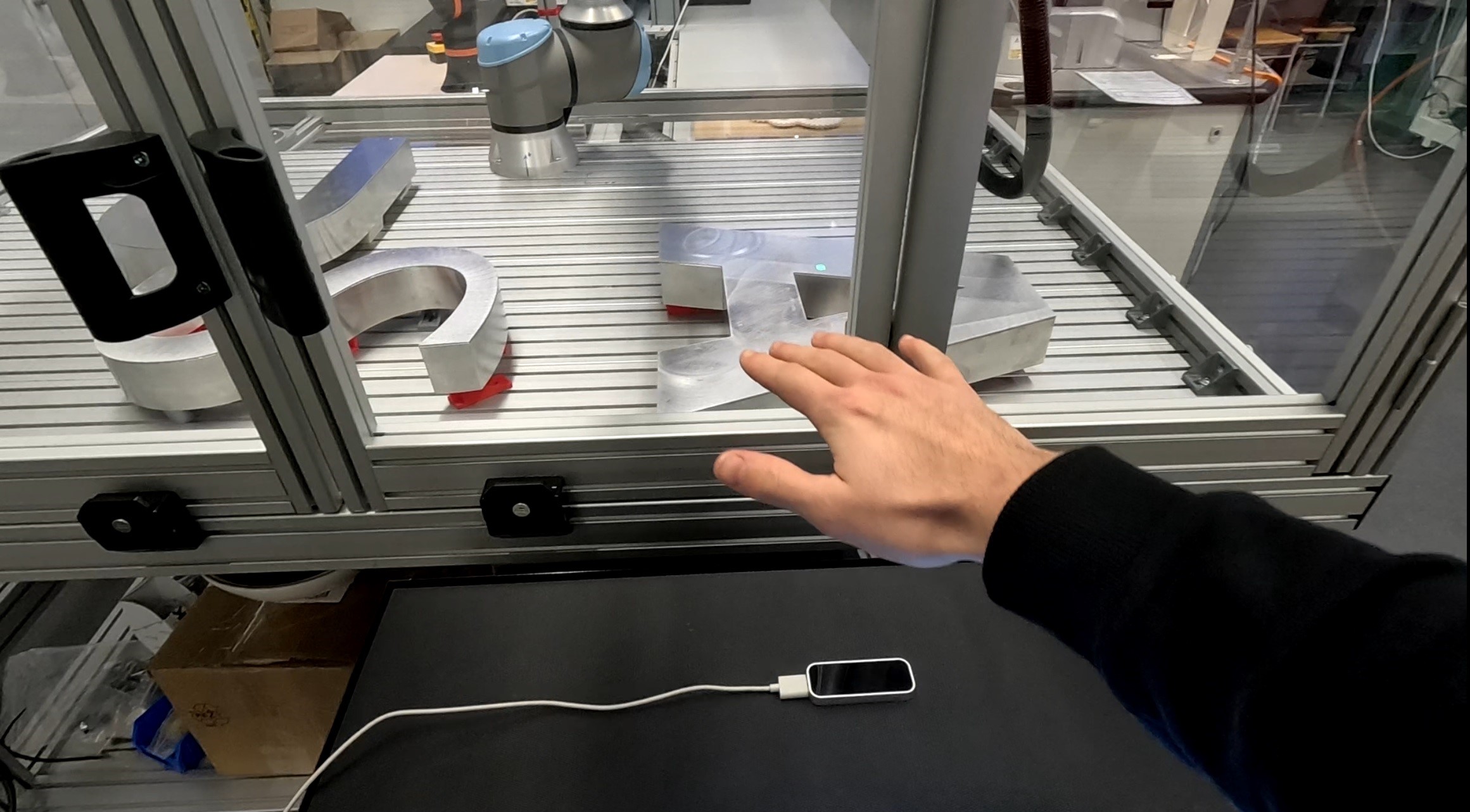
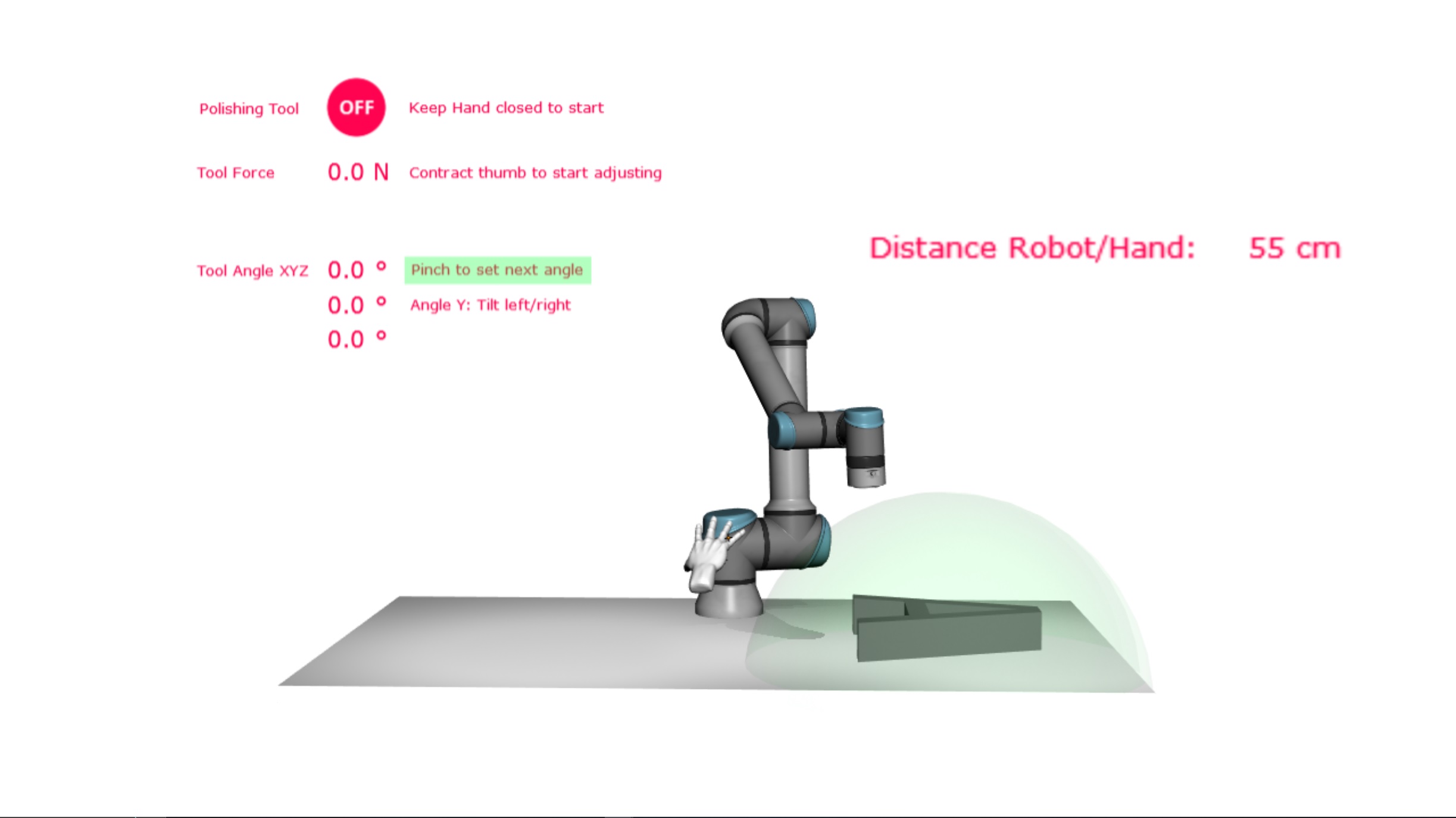
"PbG: Polished by Gesture" is an Interaction Engineering project with the goal to develop an innovative interaction with robots. The project is expanding a different research project, which is about creating an autonomous polishing tool. As an inspiration the "KIPN" project at the Technical University of Augsburg, which tries to map pedestrian movements to a robot within a display window, was used. PbG aims to make robotics more user-friendly and accessible, especially for those without a programming background. By using the Leap Motion device for hand gesture tracking, users can control the robot and its attached polishing tool within a safety-assured cell to perform a polishing task. The system offers an intuitive user experience, simplifying the complexity of robot control. However, user tests revealed challenges with precision during more complex tasks. Feedback highlighted the need for improvements in system responsiveness and user interface design to enhance the overall efficiency and user confidence. Conclusively, while PbG shows promising way of interaction with robots, the prototype requires improvements in sensor data mapping and system responsiveness, as well as interaction design. The project lays the groundwork for future developments in intuitive gesture-based robotic controls.
- Interaction
- gesture
- Technology
- robot, leap motion