2024
Grasping 3D Space
Alexander Wirtz, Marcella Klauser
When looking up online tutorials for various 3D software, chances are the first part of
many of the various series available will be about camera control and navigation in
3D. Given how humans navigate 3D at basically all times in the real world, it might
seem a surprise how this needs to be specially addressed. The problem lies that in
the real world us humans have access to a great number of joints and limbs to
control, whereas when working on a computer, movement is generally limited to the
two-dimensional plane of a mouse pad. These two degrees of freedom do of course
not cover the six required to have complete control over 3D movement, consisting of
movement in the three dimensions, as well as rotation around each of these axes. To
combat this, most programs offer control over two axes at a time, such as panning
along the view plane and at the press of a button, rotation around a virtual point.
Which button to press however, is not conventionalized and often varies from
program to program, thus creating a need for the aforementioned video tutorials on
camera control.
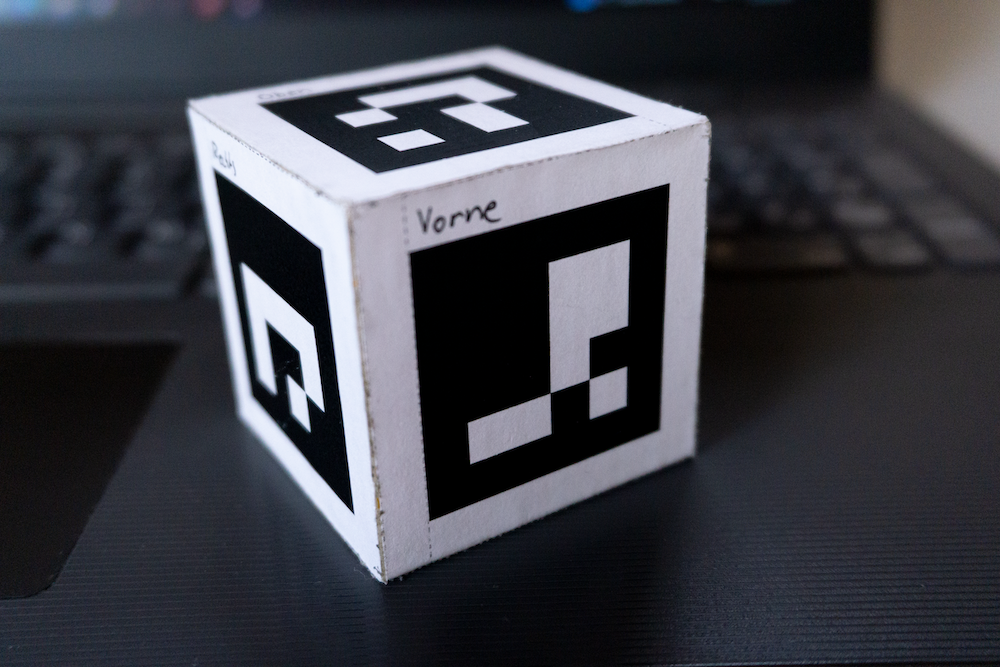
The idea behind this project was to create an alternative input method which allows
simultaneous control over all six degrees of freedom. This is achieved by tracking a
tangible object using ArUco markers, the rotation and position of which are
interpreted using Python and finally applied to a Blender viewport to control the
camera. This allows for intuitive usage as a virtual object on the screen will match
the movements of the tangible, which can be freely handled by the user. This very
direct approach to mapping is supposed to especially help inexperienced users.
- Interaction
- tangible
- Technology
- camera, fiducial markers